Estos desarrollos buscan sumar nuevas formas de inter interacción con los humanos con el objetivo de acceder a lugares donde no llegan los tradicionales robots rígidos.
na aguja flexible navega por el interior del cuerpo humano. Esquiva las estructuras que no le interesan de camino a su objetivo: un tumor en el hígado. Cuando lo localiza, su punta genera calor para extirpar el tumor con una sola incisión.
Se trata de un robot blando, diminuto, mecánicamente diseñado para aprovechar la interacción con los tejidos y acceder a tumores que están en órganos muy densos, como es el caso del hígado. Esta aguja orientable es el resultado de la investigación de Allison Okamura, profesora de ingeniería mecánica y directora de laboratorio CHARM en la Universidad de Stanford. Se basa en la idea de que los endoscopios blandos, capaces de alargar sus tentáculos como un pulpo, podrían hacer mejores diagnósticos a medida que investigan a fondo el cuerpo humano y se introducen en lugares que ninguna máquina rígida puede alcanzar.
En esta técnica se combinan elementos rígidos, que aportan precisión; y blandos, que facilitan alcanzar lugares anteriormente inaccesibles al funcionar como tentáculos. De hecho, el desarrollo de robots flexibles, que pueden estirarse, plegarse o retorcerse, está inspirado en la forma en que se mueven los pulpos y las sepias. Estos animales no tienen huesos (tal como los robots blandos no tienen elementos rígidos) y son capaces de amoldarse a su entorno.
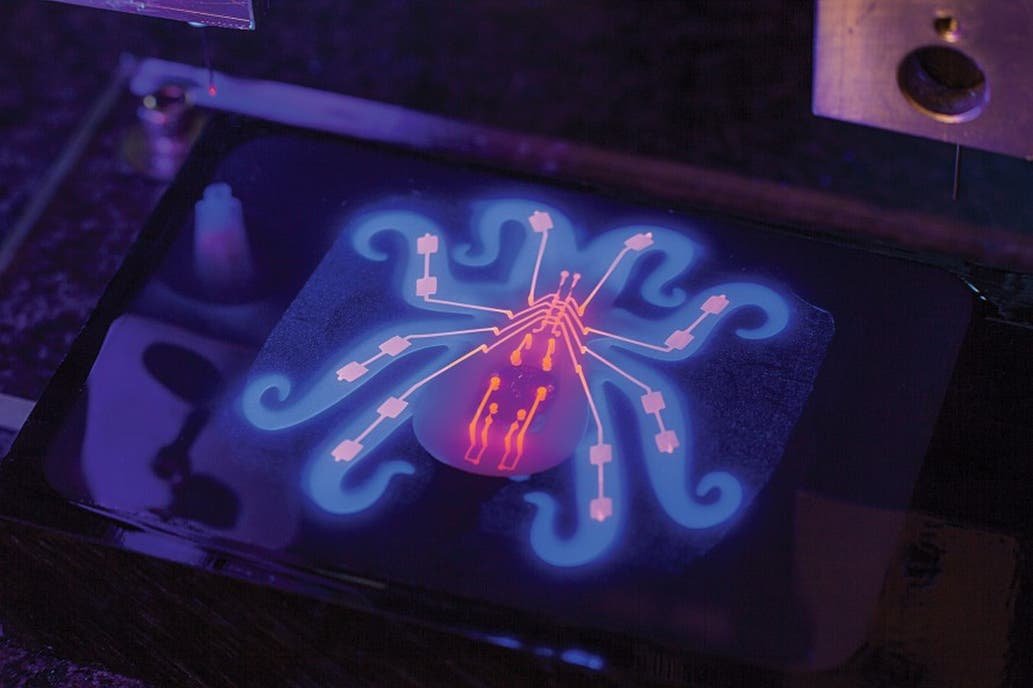
Octobot, el primer robot blando y autónomo creado, tenía forma de pulpo. Fue desarrollado por la Universidad de Harvard en 2016 y, según un reporte de la revista Nature, fabricaron el cuerpo de elastómero utilizando un molde e imprimieron en 3D todos los circuitos internos, que también eran flexibles. Octobot puso la primera piedra para la creación de máquinas autónomas fabricadas en materiales completamente blandos.
"Los materiales con los que se fabrican robots flexibles suelen ser polímeros, silicona o compuestos cuyas propiedades mecánicas les permitan alcanzar deformaciones muy grandes", explica Giada Gerbani, ingeniera biomédica de la Universidad de Stanford y supervisora de la investigación de agujas dirigibles de Okamura. Mientras que en la robótica rígida se reduce la flexibilidad del material para que sean más precisos y potentes, en la robótica suave se favorece una interacción más segura con el medio ambiente.
Con esta composición, los robots blandos son muy útiles para realizar cualquier actividad que tenga que ver con interactuar con seres humanos, acceder de forma remota a lugares donde otros robots no llegan o adaptarse a las superficies de los objetos para poder manipularlos con delicadeza. "En este caso, se utilizan garras construidas con dedos hinchables, que al presurizarse adquieren cierta rigidez al tiempo que se adaptan a la superficie del objeto, pero sin los riesgos que supondría la utilización de garras rígidas", señala Alicia Casals, catedrática y coordinadora del grupo de robótica del Centro de Investigación en Ingeniería Biomédica de la Universidad Politécnica de Cataluña.
La rigidez propia de los robots tradicionales, con placas de plástico y metal, articulaciones cables de cobre, baterías y motores eléctricos, hace que su cuerpo no se adapte a la interacción con el mundo. Son más duros que todo lo que les rodea. Por eso los expertos anticipan que los robots blandos tienen un futuro prometedor en la interacción con humanos. "Son especialmente útiles en el campo asistencial", explica Casals. "La interacción persona-robot es más atractiva si el contacto es de percepción blanda".
Pueden resultar útiles en entornos industriales, tanto en situaciones en las que tienen que cooperar con personas como al manipular objetos muy frágiles. Inspirándose en el Octobot, también "se han desarrollado otros que, mediante ventosas, pueden alcanzar una gran capacidad de prensión de objetos delicados, por muy pesados que sean".
La difícil tarea de programarlos
Los robots con cuerpos flexibles pueden moverse de un número casi infinito de formas, lo que dificulta programar sus movimientos. "El fabricante debe afrontar los retos que provocan la interacción y adaptación con el entorno", explica Casals. Esto sucede porque, según Gerbani, la mayoría de las estrategias tradicionales de control no son aplicables en los robots blandos. Sin embargo, el hecho de que sean blandos hace que puedan interactuar de manera más segura con el entorno, por lo que no es necesario que sean tan precisos en sus movimientos. "Aun así, existe la necesidad de desarrollar nuevos algoritmos de control", en opinión de Gerbani.
Otro de los rompecabezas a resolver a la hora de crear un robot flexible es la fuente de energía. Si todo en él debe ser maleable, ¿de qué material son los componentes electrónicos? ¿Qué hacemos con los tornillos y las baterías? "Los robots más simples pueden carecer de cableado o circuitos electrónicos internos", explica Casals.
En estos casos, pueden obtener la energía que necesitan para funcionar de microfluidos, como en el caso del Octobot, que se impulsa al transformar un líquido en gas con el que activa de manera neumática los brazos. "Otra opción es dotarlos de células fotovoltáicas, cuando es posible". También funcionan con ondas o aire a presión. Pero la práctica más extendida pasa por utilizar fuentes de alimentación más tradicionales (como cables o baterías) pero integrados con el material flexible. "Cuando el robot es autónomo, la energía en general proviene de las baterías de que están dotados. Si el robot es de base fija, lo más usual es la conexión a la red eléctrica", explica Casals.
"Parece que varios grupos ya han comenzado a abordar algunos de los retos a los que se enfrentan los robots flexibles y están combinación partes rígidas y blandas en el mismo marco robótico", cuenta Gerbani. "Es un desafío difícil, pero también emocionante, hacer que los robots blandos sean eficientes y útiles como lo son los rígidos". Ambas expertas están de acuerdo en que sus aplicaciones son muy prometedoras, "pero con un ritmo de desarrollo que seguramente será mucho más lento de lo pronosticado", especifica Casals.


 LV16.com
LV16.com

 Informe 16
Informe 16


 Mucha Mer
Mucha Mer